 Laboratorio Piano Lauree Scientifiche
Geometrie non Euclidee
Centro Educativo Ignaziano
Palermo
Laboratorio Piano Lauree Scientifiche
Geometrie non Euclidee
Centro Educativo Ignaziano
Palermo

Concetti fondamentali del sistema iperbolico
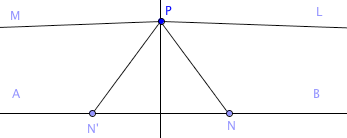
Passiamo ora ad alcuni concetti fondamentali di questa nuova geometria. Si considerino una retta AB e un punto P fuori di essa e si mandi per P la perpendicolare PO ad AB. Si prenda ora un altro punto N qualsiasi su AB. Se supponiamo che il punto N si allontani sulla retta nel verso, ad esempio che va da O verso B, si possono avere due casi:
a) N può ritornare al suo punto di partenza dopo aver percorso una distanza finita. Ciò corrisponde alla geometria non euclidea ellittica.
b) N può continuare a muoversi come sopra detto e la distanza ON tendere all’infinito, il che vale nella geometria ordinaria. La retta PN tende allora a una posizione limite definita PL e PL è detta essere parallela a OB (PL||OB). Ripetendo l’argomento per un punto N’ preso alla sinistra di O si giunge alla conclusione che PM||OA.
Ora nel caso b) si prospettano le due seguenti possibilità:
b1) Nell’ordinaria geometria euclidea le due semirette PL e PM costituiscono una sola retta, ossia gli angoli ^OPL e ^OPM sono entrambi retti.
b2) Nella geometria iperbolica invece si assume l’ipotesi che le due semirette PL e PM siano distinte e che i due angoli sopra detti siano acuti.
Poniamoci ora nel caso b2). Nella geometria iperbolica si avrà la seguente definizione: due rette PL e OB si dicono parallele quando sono complanari, non si incontrano se prolungate indefinitamente, mentre ogni semiretta condotta per P entro l’angolo ^LPO incontra la retta OB. Ne viene allora che data una qualunque retta AB, per un punto P fuori di essa si possono sempre condurre due parallele PL e PM tali che PL||OB e PM||OA.
Ci limitiamo a ricordare che nella geometria iperbolica la somma degli angoli interni di un triangolo risulta essere minore di due retti e, detta difetto di un triangolo la differenza D= - A – B – C fra un angolo piatto e la somma degli angoli interni del triangolo, si ha che la superficie del triangolo è proporzionale al rispettivo difetto.